



三、激光头的结构及光盘信息读出原理
1.激光头的结构与作用
(1)激光头的基本结构
激光头由激光二极管、光路和光接收系统等几部分组成。常用的激光头又可分为三光束激光头和全息激光头两大类。
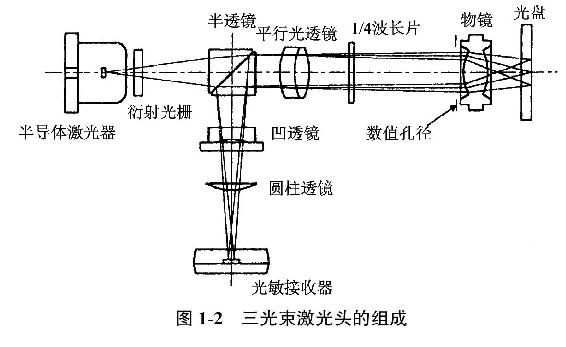
三光束激光头的组成如图1-2所示。激光二极管发射出波长为0.78 μm、功率约5 mW的激光束,通过衍射光栅将激光二极管发射的单一光束分成3条光束,再经平行光透镜变成3束平行光,最后由物镜会聚成3个光点并投射到VCD盘或CD盘上。从光盘上反射回来的光经过物镜、平行光透镜、半透镜反射90°,再经凹透镜会聚成3个相应的光点,投射到光敏接收器上,由光敏接收器将反射光的强弱变成电信号。
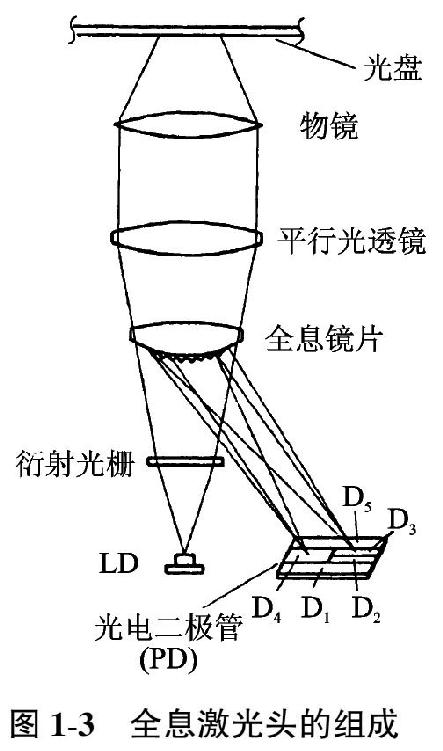
全息激光头的组成如图1-3所示。激光二极管发射出的激光首先由衍射光栅分成3束,再经全息镜片、平行光透镜和物镜将激光束聚焦在光盘信号坑上。从光盘上反射回来的激光经物镜和平行光透镜照射到全息镜片上。全息镜片由两种不同的衍射光栅组成,它对激光二极管发射出的激光具有透射性,而对光盘反射回来的激光具有折射性,其反射光经折射后便被分开,投射到光敏接收器上,用于检测光盘上的信息。全息镜片在折射时,将反射回的主光束分裂成两束光,称为主光束反射光;将反射回的两束辅助光分裂成4束光,称为辅助光束反射光。这6束光投射到5分光敏接收器上,主光束反射光用于产生RF信号和聚焦信号,辅助光束反射光用于产生循迹信号。
全息镜片和衍射光栅是不能调整的,当其损坏或老化不能使用时,只能更换全息激光二极管。
(2)激光头的功能
激光头的主要功能是发射激光,拾取光盘上的信息并检测从光盘上反射回来的激光,将此反射激光变换成电信号。为了准确地拾取光盘上的信息,激光头还具有聚焦和循迹功能。
① 聚焦功能。在重放中光盘总是有不平度误差(又称为翘曲度),这个误差在生产中控制在±0.4 mm之内。另外,光盘在旋转中,其表面总是会不停地跳动,这个跳动量在生产中控制在±0.5 mm之内。由于光盘坑的深度为0.1 μm,是光盘的不平度和旋转跳动量的数千分之一,故在重放中激光束焦点随时可能脱离信息坑,如图1-4所示。
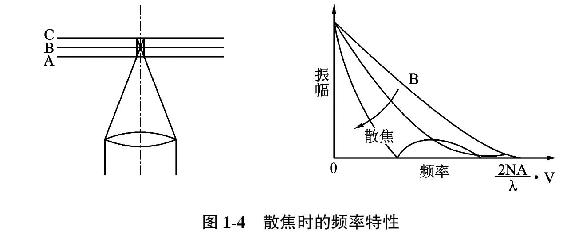
在图1-4中,B为激光束焦点准确地落在信息坑上的情况。当焦点脱离信息坑轨迹时,就会出现过近(图中A)和过远(图中C)两种情况。不论是过近还是过远,都会产生散焦现象。散焦后,光束的频率特性变差,不能准确地从光盘上拾取信息。为了使光束有稳定的频率特性,即随时都能准确地拾取光盘上的信息,必须动态地控制激光头,使激光头根据光盘的不平度和旋转时的跳动量随时调整其焦点的位置,使焦点始终落在信息坑上。这就是激光头的聚焦功能,该功能由聚焦伺服机构来实现。
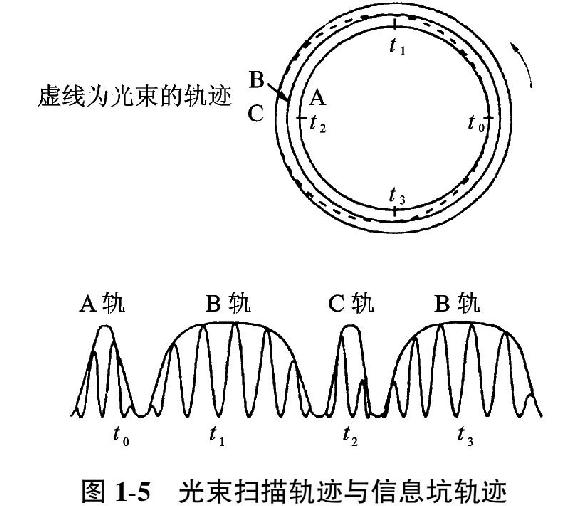
② 循迹功能。如图1-5所示,光盘上的信息坑轨迹是由小到大的圆。由于制造误差,这些圆的圆心与中间定位孔的圆心很难重合在一点上。另外,光盘装在主轴电机上,由于主轴电机的制造误差,主轴的旋转中心不可能是一个点,而是一个椭圆,该中心与光盘的定位孔中心由于制造误差也不可能完全重合。这些误差使光束焦点在光盘上的扫描轨迹脱离信息坑轨迹(在光盘上,信息坑轨迹之间的节距为1.6 μm,信息坑本身的宽度为0.5 μm),于是从信息坑上拾取的信号也发生了变化。在时间t0时拾取轨迹A信号,t1时拾取轨迹B信号,t2时拾取轨迹C信号,t3时又拾取轨迹B信号,在轨迹交越处激光头无信号拾取(如同信号失落)。这样,信号在重放时便会发生错乱。为此,激光头必须具有准确地跟踪信息坑轨迹的能力,使之在重放中即使信息坑轨迹与激光束扫描轨迹出现了偏心,也能调节激光头,校正其扫描轨迹,使之与信息坑轨迹重合。这就是激光头的循迹功能,该功能由循迹伺服机构来实现。
(3)几种实际的激光头
激光头可分成三部分。第一部分俗称激光枪,由激光二极管、光敏接收器和各种透镜组成,它们都安装在一个腔体内。第二部分俗称光学头,这是个可动部分,它除了物镜外,还包括聚焦机构和循迹机构。第三部分为送进传动机构,它带动整个激光头作平行移动。图1-6是国内VCD视盘机采用得较多的飞利浦机芯的激光头顶视图。该激光头采用全息照相式激光二极管,在激光枪与物镜之间设置了一个45°反射镜,使激光枪发射或接收的激光束与投射到光盘或从光盘反射回来的激光束呈90°,以减小激光头的厚度(或叫高度),使激光头薄型化。
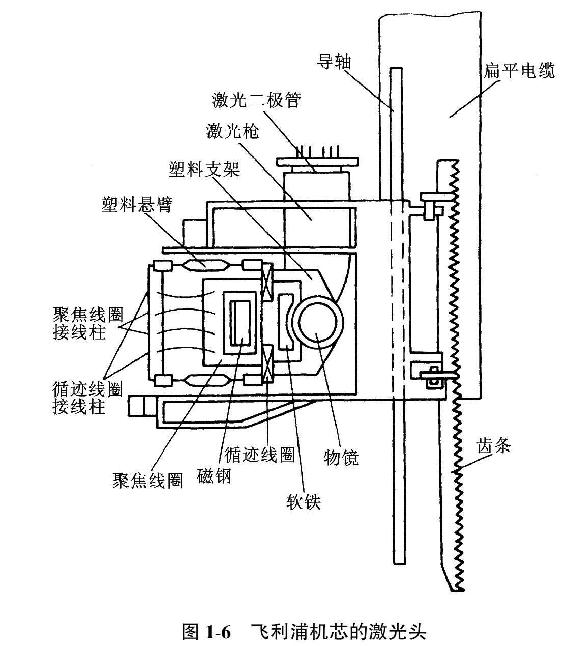
激光二极管粘接在激光枪的尾部。物镜粘接在塑料支架上,支架与塑料悬臂连接在一起。聚焦机构由聚焦线圈和磁钢(永久磁铁)组成。当聚焦线圈中有电流时,产生的磁场与磁钢的磁场相互作用,产生推力,使塑料悬臂向上或向下移动(即垂直于纸面),并通过塑料支架带动物镜向上或向下移动,实现聚焦功能。循迹机构由循迹线圈和磁钢组成,其工作原理与聚焦机构一样。由于安装位置与聚焦机构呈90°,故产生的推力使塑料悬臂向左或向右(平行于纸面)移动,并通过塑料支架带动物镜向左或向右移动,实现循迹功能。送进机构由导轴和齿条构成,送进齿轮驱动齿条运动,齿条便带动激光头在导轴上作平行移动,在重放时使激光头从光盘的内圈逐步移动到光盘的外圈。激光头输出的电信号通过扁平电缆与整机电路相连。
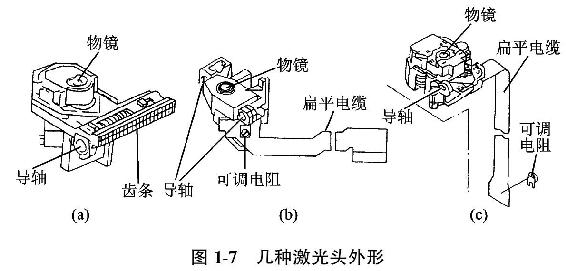
图1-7(a)、(b)和(c)分别为索尼、松下和先锋的激光头外形,采用的均是三光束激光头,其激光枪的构成与飞利浦的不一样。这三种激光头的工作原理虽然相同,但外形结构有区别,故不能互换。
(4)激光头的等效电路
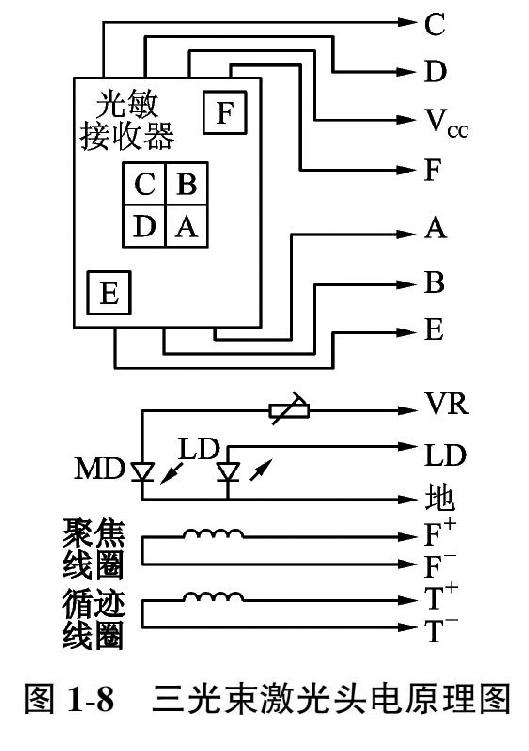
① 三光束激光头电路。三光束激光头电路如图1-8所示。激光发射管(LD)用二极管符号表示,向外的箭头表示发射激光。用于激光功率控制的检测管实际上是一个光敏接收二极管(MD),故也用二极管符号表示,向内的箭头表示接收激光。可调电阻一般接在激光功率检测二极管MD的回路中,调节MD的检测灵敏度,也就控制了供给LD的工作电流,即控制了LD发射激光功率的大小。
光敏接收器由A、B、C、D、E、F 6只光敏二极管构成。它们输出的6个电信号也分别用A、B、C、D、E、F表示。有的公司将A、B、C、D分别用A1、A2、A3、A4表示,将E和F分别用B1、B2表示。Vcc是它们的工作电压,一般为5 V。
激光头中部装有聚焦线圈和循迹线圈,在电原理图中分别用线圈符号表示,并用F表示聚焦,T表示循迹。
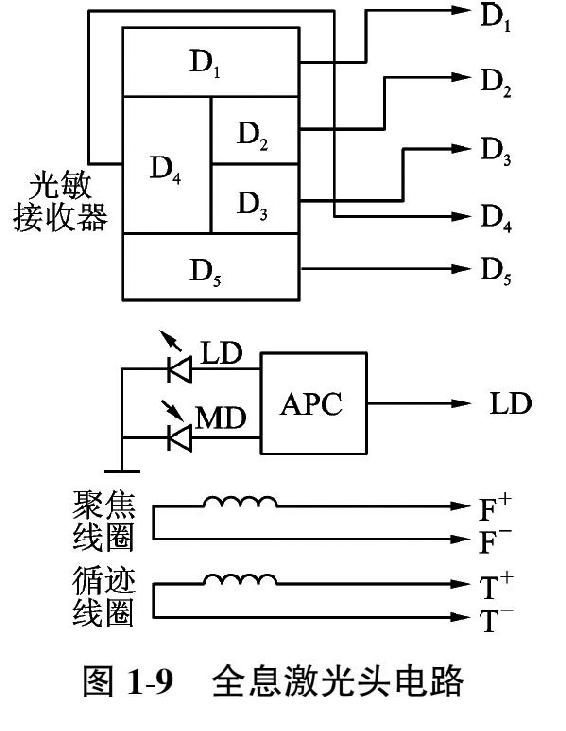
② 全息激光头等效电路 飞利浦公司的全息激光头电路如图1-9所示。光敏接收器由5只光敏二极管D1、D2、D3、D4、D5组成。它们输出的电信号也用D1、D2、D3、D4、D5表示。
(5)激光头自动功率控制电路
激光头自动功率控制(APC)电路用于控制激光二极管(LD)的激光发射功率,也就是控制激光二极管的驱动电流。驱动电流越大,激光功率越强;驱动电流越小,激光功率越弱。驱动电流一般在50 mA左右,当激光功率为5 mW时激光头就能正常工作。
APC电路如图1-10所示。LD的驱动电流由驱动管T提供,T输出驱动电流的大小由APC电路控制。APC电路一般与RF放大器集成在一个芯片中。激光功率检测管MD用于检测LD发射激光的强弱,将光强度转换成电信号,送到APC电路,经运算放大后去调节T的基级电位,达到调节驱动电流的目的。可调电阻VR用于调节MD的工作电流。该电流的大小决定了MD的工作灵敏度,而此灵敏度的高低也就决定了LD的初始工作电流(即初始激光功率)。随着LD使用时间的增长,其发射能力可能减弱,造成激光头读盘能力减弱,即光盘质量好的能读盘,光盘质量较差的就不能读盘,此时可微调VR电位器,降低MD的灵敏度,通过增加LD的初始工作电流来加大LD的激光发射功率。由于增大LD的初始工作电流会加快LD的老化,因此在调节VR电位器时,一定要确认激光头读盘能力变差,是LD发射能力减弱造成的,还是激光头中光学系统被灰尘污染造成的,以免因误调而影响LD的寿命。
LD的工作电压一般是在系统控制微处理器的控制下,由RF放大电路提供。视盘机在工作时,系统控制微处理器控制APC电路输入LD工作电压,APC电路便输出低电平,使驱动管T导通,输出驱动电流,LD发射激光。当机内无光盘或用户操作“暂停”(STILL)或“停止”(STOP)键时,系统控制微处理器控制RF放大电路停止输出LD工作电压,驱动管T截止,不输出驱动电流,LD不发射激光。
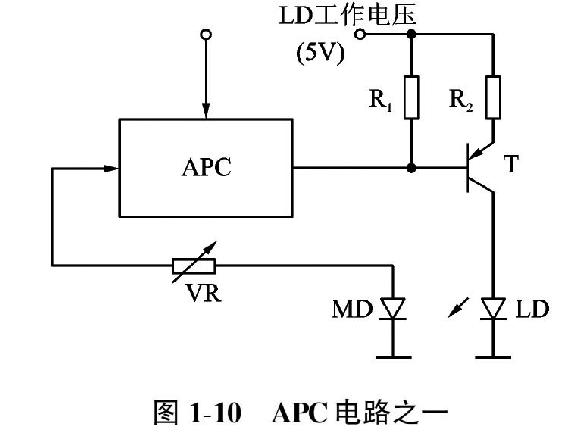
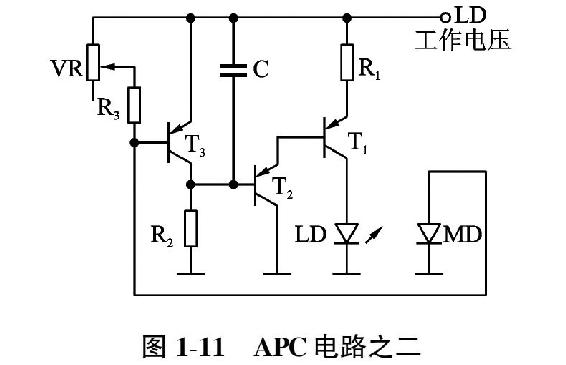
图1-11是飞利浦公司的激光头采用的APC电路。它由分立元器件构成,直接安装在激光头组件的扁平电缆上,其工作原理与图1-10所示电路的工作原理相同。驱动管T1为LD提供工作电流,T2和T3构成APC电路,用于调节T1输出电流的大小。LD工作电压也由RF放大电路提供。
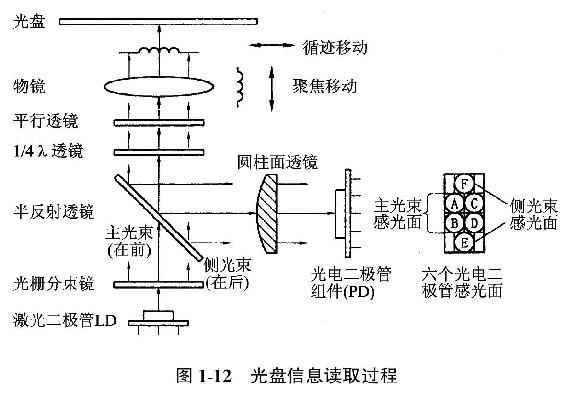
2.激光头读出信息的原理
如图1-12所示,激光二极管发射出的激光束经过光栅分束镜分为三束光。中间一束为主光束(在前),用于拾取声、像信息和聚焦误差信息;两侧为侧光束(在后),用于拾取循迹误差信息。三束光平行通过半反射透镜,阻止垂直极化光束通过,又经(1/4)λ(激光波长)镜片产生90°的相位延迟,变为圆形极化光束,经平行透镜和物镜精确地照射在光盘上的信息轨迹上(信息轨迹的基本信息单元是椭圆形坑槽)。反射回来的激光束又穿过物镜、平行透镜、(1/4)λ镜片,再次产生90°的相位延迟,与入射光束相差180°相位,仍为平行光束。然后经半反射透镜转移90°,通过圆柱面透镜照射到光电二极管组件上。主光束照射到A、B、C、D感光面上,将光信号变为电信号(即图像、伴音和聚焦误差信号)。侧光束照射到E、F感光面上,转换为循迹误差信号。聚焦误差信号经聚焦伺服电路控制物镜作轴向移动,达到精确聚焦的目的。循迹误差信号通过循迹伺服电路控制物镜进行水平方向微动,达到准确跟踪信息轨迹的目的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











